LIMNMEDIA - First Motion & Range of Motion Test
This set of images coincides with the first time the boom arm was moved under motion control.
LIMNMOCO Build — First Motion & Range of Motion Test
This set of images coincides with the first time the boom arm was moved under motion control.
The boom is being driven by Dragonframe, through an Arduino, on a single motor axis. This is essentially the “hello world” moment for the crane.

Up until this point, everything has been layout, cutting, drilling, fitting, and assembly. Now the system actually responds to input and moves in a controlled way.
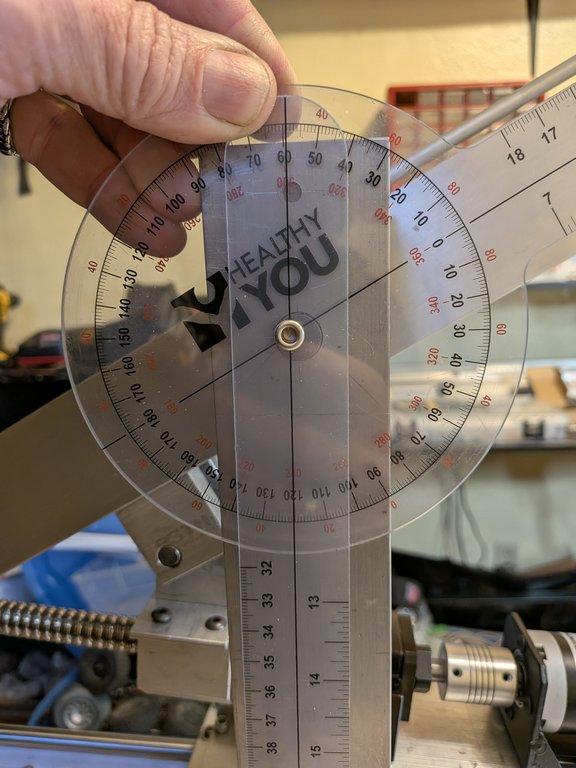
At the same time, I’m using a goniometer and a digital inclinometer to measure the actual range of motion of the boom as it lifts.

The boom reaches roughly 27° of upward travel. That is enough to prove the system works, but it is clearly not the full range I want.
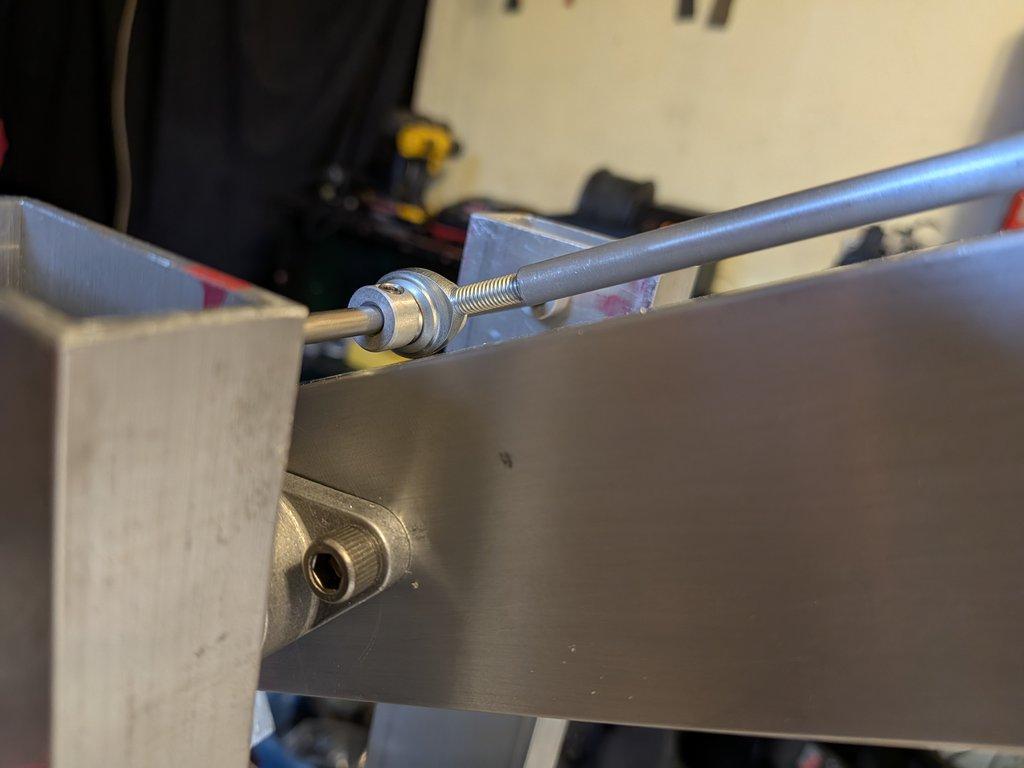
The limitation shows up immediately once the system is in motion. The parallelogram linkage is running out of space. The eyelet on the upper link contacts the square tube too early, so the geometry closes down before the boom can travel further.
So the issue is not really the motor or the drive. The limitation is the physical layout of the linkage.
This points directly toward the next iteration: increasing the distance between the upper and lower members of the parallelogram, and making the upright structure taller. That added height should give the linkage more room to move before it starts interfering with itself.
This is exactly why this kind of test matters. You do not discover every limitation on paper. You discover it when the system actually moves.
There is a saying that fits this moment: perfect is the enemy of getting it done.
The goal is not to build the final version on the first pass. The goal is to build something that works, learn from it, and improve it.
Even at this early stage, the system is proving something important. A motion control crane can be developed with basic tools, straightforward fabrication, and accessible methods. It still costs money in aluminum, hardware, and time, but compared to professional systems that can cost tens of thousands of dollars, this approach lowers the barrier dramatically.
This is the transition point from static structure to controlled motion. The crane is no longer just assembled. It is behaving.
More to follow as the system develops.
— Christopher
LIMNMEDIA
Christopher Weinberg
Christopher Weinberg is the founder of LIMNMEDIA, where he develops motion control systems, production workflows, and educational tools focused on stop-motion and hybrid filmmaking. With over 15 years of experience in production, his work centers on making complex techniques more accessible through practical engineering and open development. He is currently building LIMNMOCO, a modular motion control system designed for flexible, real-world use.
No comments yet. Login to start a new discussion Start a new discussion