LIMNMEDIA - Drilling the Main Boom Pivot Shaft Hole
This set of images shows the drilling of the main boom arm pivot hole, one of the more important alignment steps in the crane build.

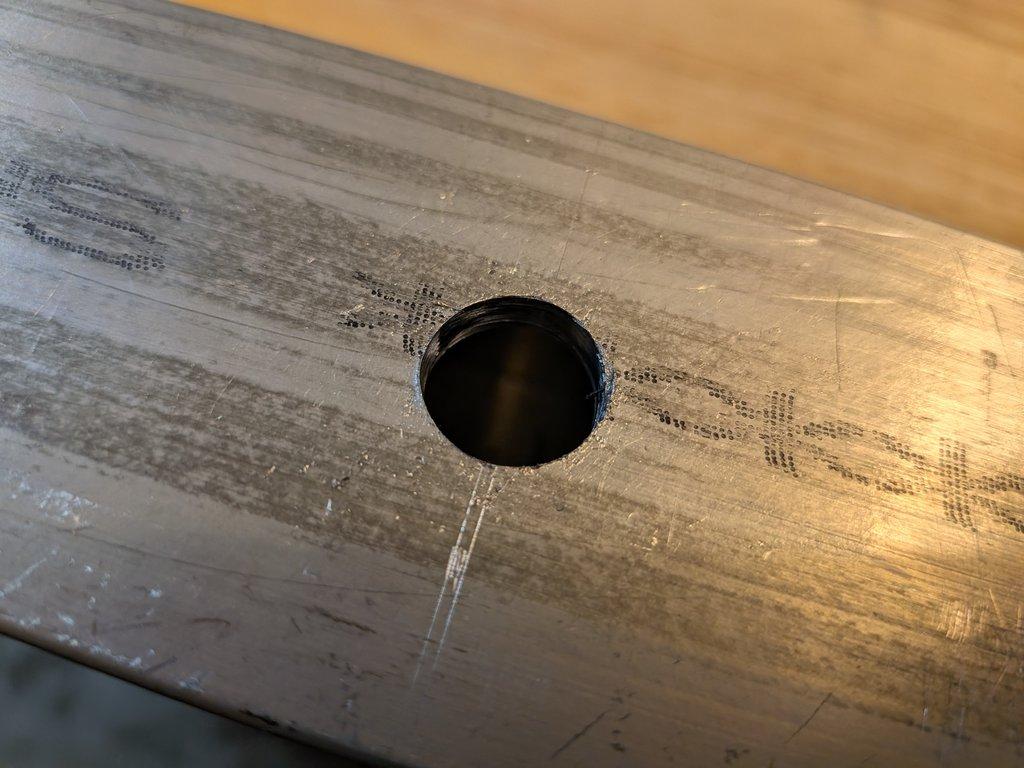
This hole carries the 12mm shaft that connects the boom arm to the uprights, so its position and accuracy directly affect how freely the arm can pivot.

At this stage, the upright supports are 1 x 2 inch aluminum tube, 12 inches tall, and the boom arm is a 2 x 2 inch tube, 4 feet long. Even in a prototype, this is the point where the geometry starts becoming real.

Process

The main task here was drilling the uprights and boom arm for the 12mm pivot shaft. I needed a specific size bit so the shaft would pass cleanly without forcing the fit. You can see in the images that when the pieces are laid flat on the bench, the alignment is close enough that the shaft can pass through freely. That’s the practical test—more meaningful than just trusting the measurement on paper.
This kind of operation really rewards patience. The hole location has to work not only for the current part in your hand, but for the relationship between all the connected parts that follow. It’s easy to rush ahead because you want to see the assembly come together, but this is exactly the kind of step where slowing down saves time.

Notes
Originally, I planned to mount bearings directly on the uprights, but as the design progressed it became clear that the boom drive introduced enough variation that the approach needed to change. That’s one of the realities of prototyping: you make a plan, test it against the real geometry, and then let the build tell you what actually works.

There’s a saying in racing that goes something like, fast is smooth and smooth is slow. Whether or not I’m quoting it perfectly, the principle applies here. Going slowly, checking alignment often, and thinking a couple steps ahead is what keeps the project moving. Every hole has consequences beyond itself.
At the same time, one of the things that helps me through the rough spots is remembering what this build is actually for. This is the prototype. The goal is to make it work, not to make it beautiful. I’m trying to show how to build the skateboard version, not the Ferrari version. That mindset makes it easier to keep moving when something is functional but not elegant.

LIMNMOCO Context
This pivot point is where the crane starts acting like a crane instead of a stack of mechanical subassemblies. Up to now, the build has mostly been about the base, track, sled, and rotation system. Here, the vertical structure and the boom geometry begin to connect into one motion path.

The 12mm shaft becomes the hinge line for the main arm, and its position determines how well the boom can move, how square the assembly feels, and how much adjustment room exists later when the drive system is added.

I’m also planning a second set of uprights at roughly twice the height. This initial height was chosen primarily for economy—using shorter material to validate the geometry and keep costs down during the prototype phase. Once the system is proven, scaling the uprights will allow for greater range of motion and better represent the intended use of the crane.
Why This Matters
A pivot hole like this is deceptively simple. It’s just a hole—until it isn’t. If it’s off, even a little, the shaft binds, the arm twists, and the geometry starts fighting itself. If it’s right, the whole assembly feels natural.
This step also says something important about the project as a whole: prototyping is not about perfection. It’s about proving the concept, learning where the real constraints are, and making design decisions based on actual build experience instead of guesses.
Christopher Weinberg
Christopher Weinberg is the founder of LIMNMEDIA, where he develops motion control systems, production workflows, and educational tools focused on stop-motion and hybrid filmmaking. With over 15 years of experience in production, his work centers on making complex techniques more accessible through practical engineering and open development. He is currently building LIMNMOCO, a modular motion control system designed for flexible, real-world use.
No comments yet. Login to start a new discussion Start a new discussion