LIMNMEDIA - Ball Screw Installation & Track Length Tradeoffs
This phase covers the installation of the ball screw onto the track system and a key practical constraint: the mismatch between the 2-meter linear rail and a 1-meter ball screw.

The rail I picked up is a full 2 meters long, while the ball screw is only 1 meter. The rail itself was an inexpensive unit intended for 3D printer-style applications—good enough for prototyping, but not really scaled to what this system wants to become.
⸻
Objective
The goal here was simple: get the ball screw installed, align it with the sled, and confirm that the system moves cleanly. At the same time, this setup became a test case for how component sizing affects usability, especially when working within a cost constraint.
⸻
 Process
Process
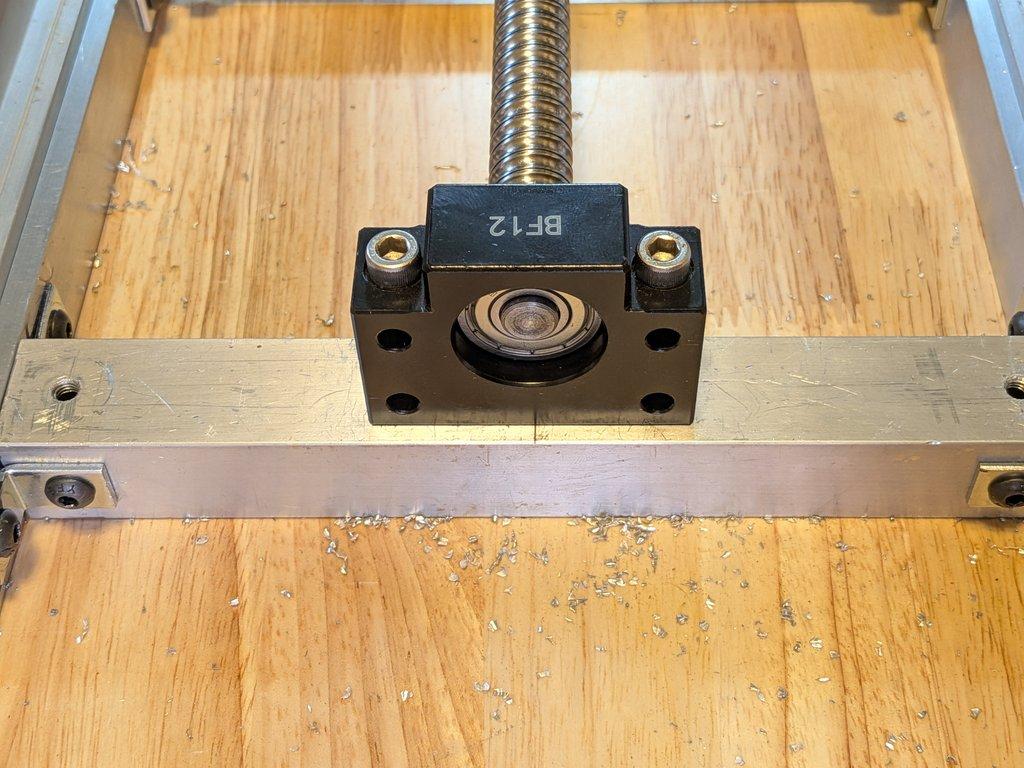
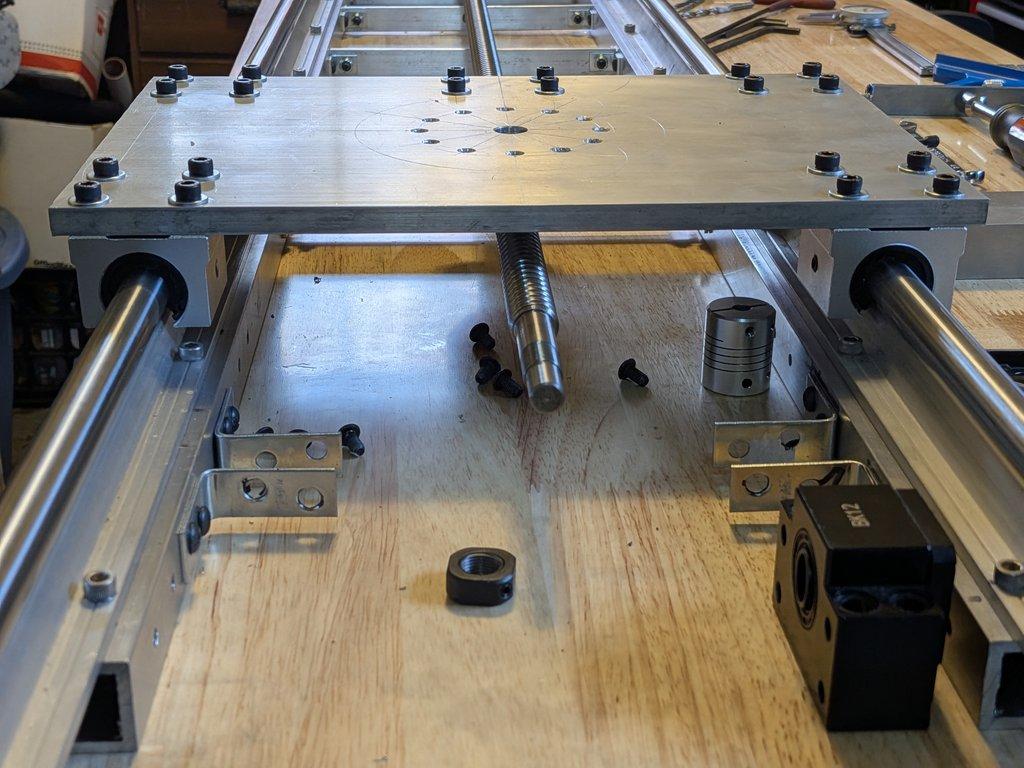
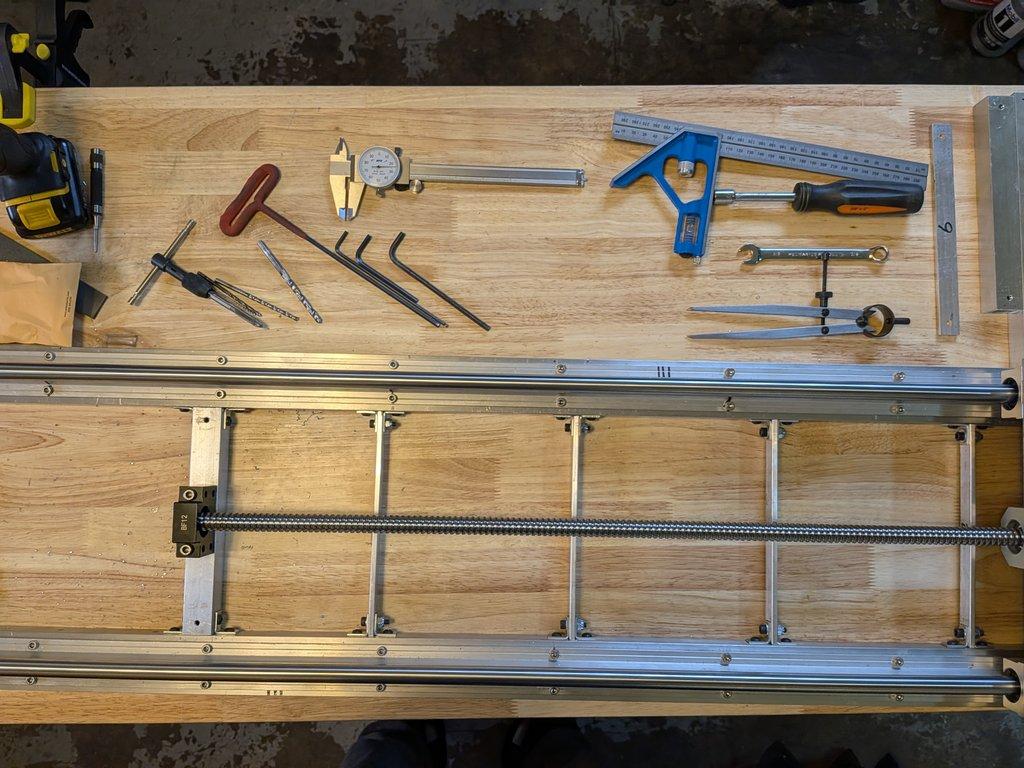
The rail was laid out across the full length of the work surface, which immediately made its scale apparent. At 2 meters, it’s workable, but definitely pushing the limits of a standard bench setup. The ball screw was then installed along the rail, with the nut attached to the sled assembly. Once everything was in place, I ran through a basic alignment check and started moving the sled manually to get a feel for how it behaved.
What became clear right away is that only about half of the rail is actually active. The ball screw defines the usable travel, so the remaining length just extends beyond that range. Mechanically, everything works—the motion is smooth, the alignment holds—but the system isn’t making full use of its footprint.
⸻
Notes
Working at this scale introduces a different kind of friction, not in the motion itself, but in handling. The longer rail is harder to reposition, harder to keep square on the bench, and generally adds a layer of awkwardness to the process. That’s not a failure of the component, just a mismatch between what it was designed for and how it’s being used here.
The cost decision is visible in the outcome. The rail was inexpensive and accessible, which made it a good entry point, but it also means compromising on proportionality. The shorter ball screw creates a dead zone in the system, and while that’s fine for testing, it’s not something you’d carry into a final build.
At the same time, the important part is that the core idea is validated. The sled engages properly, the motion feels consistent, and the system behaves the way it needs to at a basic level.
⸻
LIMNMOCO Context
This is one of those stages where the prototype is doing exactly what it should do. It’s not about being perfect—it’s about answering the question: does this configuration work?
The answer here is yes. The motion system is viable. The relationship between the sled, the rail, and the screw is sound. What’s being revealed now is how to refine it—how to bring the proportions into alignment so the system is efficient as well as functional.
⸻
Why This Matters
In a motion control system, geometry matters just as much as mechanics. A setup can be technically correct and still be impractical to use. The mismatch between rail length and screw length is a good example of that. It doesn’t break the system, but it introduces inefficiencies that become more obvious the longer you work with it.
This is exactly the kind of thing that only shows up in a real build. On paper, it’s easy to overlook. In practice, it’s immediate.
⸻
Next Steps
The next move is to decide whether to bring the rail length down to match the screw, or extend the screw to take advantage of the full rail. Either way, the goal is to bring those two components into alignment so the system feels intentional rather than improvised.
From here, the build continues toward motor integration and coordinated axis movement, alongside the ongoing work on the pulley and rotation stage.
Christopher Weinberg
Christopher Weinberg is the founder of LIMNMEDIA, where he develops motion control systems, production workflows, and educational tools focused on stop-motion and hybrid filmmaking. With over 15 years of experience in production, his work centers on making complex techniques more accessible through practical engineering and open development. He is currently building LIMNMOCO, a modular motion control system designed for flexible, real-world use.
No comments yet. Login to start a new discussion Start a new discussion